

Эксплуатация судовых энергетических установок
Эксплуатация судовых энергетических установок
В последнее десятилетие автоматизация судовых дизельных и газотурбинных установок претерпела большие изменения: значительно возрос объем автоматизированных операций, усложнились средства автоматизации и главное автоматизация обеспечила повышение производительности труда судового экипажа и безопасности мореплавания. Изучение автоматизации судовых энергетических установок должно отводиться все большее место в подготовке судовых специалистов. Эффективность эксплуатации современного автоматизированного судна в равной степени зависит от качества судовых объектов, так средств автоматизации.
Изучение энергетического оборудования в системе автоматизации в отрыве друг от друга не соответствует реальным условиям работы специалистов. В качестве судовых энергетических установок (СЭУ) получают распространение на ряду с малооборотными дизелями, а также газотрубные, и газопаровые, обеспечивающие высокие скорости.
Создание материально-технической базы требует нарастающих темпов увеличения производительности труда на основе непрерывного технического прогресса, составной частью которого является автоматизация производства. Стремительно развиваются принципиально новые технологические процессы производства, управление которых без средств автоматизации невозможно.
Автоматика и телемеханика — это отрасль науки и техники, где разрабатываются методы и средства контроля производства, процессов и управления ними.
Под автоматикой понимается техника управления и контроля на сравнительно небольших расстояниях, для определения которых требуются специальные средства. В народном хозяйстве, в промышленности, энергетике, на транспорте.
В связи с ростом энерговооруженности флота объем средств автоматизации значительно увеличивается.
Автоматизация позволяет выполнять операции управления с быстротой и точностью, недоступными человеку; улучшать условия труда людей и значительно уменьшать численность обслуживающего персонала, повышая тем самым экономичность эксплуатации судна.
Внедрение средств комплексной автоматизации и ряд организационно технических мероприятий обеспечили переход на совмещение профессий палубной и машинной команд на всех судах внутреннего плавания, а также эксплуатацию судовой энергетической установки без постоянной вахты в машинном отделении. Это позволило освободить людей от необходимости длительного пребывания в помещениях с высокой температурой, влажностью, повышенным содержанием углеводородов, сравнительно высоких уровней звукового давления и вибрации.
Технико-экономическая эффективность систем автоматизации зависит от выбора средств автоматики, их унификации, надежности, ремонтопригодности и простоты обслуживания. Внедряемые системы автоматики создаются на основе современных требований с применением последних достижений электронной техники.
Дальнейшее совершенствование средств автоматики и внедрение ее на судах обеспечат экономичную работу силовой установки, существенно повысит безопасность плавания.
В арсенале средств, составляющих техническое вооружение всех отраслей народного хозяйства, ведущее место занимают электрические машины. Электрическая машина — это электромеханическое устройство, осуществляющее преобразование механической и электрической энергий. Если в электрической машине механическая энергия преобразуется в электрическую, то она называется электрическим генератором, если же электрическая энергия преобразуется в механическую, то машина называется электродвигателем. Электрические генераторы составляют основу современных электростанций, где преобразуют механическую энергию паровых или гидравлических турбин в электрическую. Электродвигатели составляют основу электропривода, где электрическая энергия преобразуется в механическую, необходимо для приведения в действие станков, механизмов, подъемных и транспортных средств.
По степени автоматизации судовые электроприводы принято разделять на 3 уровня автоматизации. Наиболее простыми являются электроприводы с первым уровнем автоматизации. Это приводы, которые требуют участие обслуживающего персонала как для выработки начального управляющего воздействия, так и для контроля в процессе последующей работы электропривода. При втором уровне автоматизации обслуживающий персонал участвует только в выработке начального управляющего воздействия на электропривод. Более совершенным является третий уровень автоматизации, при котором обслуживающий персонал участвует только в надзоре за электромеханической системой. Ручное управление при этом уровне предусматривается, но только при особых режимах судна и его автоматической установке.
Общая тенденция в развитии судовых механизмов характеризуется усложнением возлагаемых на электроприводы задач как по повышению степени автоматизации, так и по упрощению их обслуживания. Это направлено на повышение производительности труда путем автоматизации и механизации труда. Повышение производительности труда на судах связано также со снижением затрат времени на техническое обслуживание и ремонт за счет совершенствования конструкций электроприводов и приспособлений их к специфическим условиям судовой эксплуатации. В свете этих задач реализуются следующие направления, по которым идет совершенствование электроприводов судовых механизмов — автоматизацией отдельных электромеханизмов и объединения взаимосвязанных механизмов в автоматизированные системы с оптическим режимом эксплуатации. В системе управления электроприводом все чаще включают вычислительные машины, микропроцессоры, с большой точностью осуществляющие операции управления, ранее выполненные человеком:
— повышение надежности и ресурса электроприводов за счет совершенствования конструкций и правильного выбора отдельных элементов;
— снижение издержек на ремонтные работы за счет унификации элементов и применение блочных конструкций.
Автоматизация судовых электроприводов вместе с использованием средств диагностирования позволит в минимальные сроки восстановить их работоспособность при постепенных или внезапных отказах, а также значительно сократить трудозатраты на их обслуживание.
Современное судно представляет собой сложное инженерное сооружение с многочисленными системами и устройствами и предназначено для решения главной задачи — перевозки грузов и пассажиров, обеспечивая при этом безопасность мореплавания, сохранность груза и рентабельность перевозок.
Конечной целью развития комплексной автоматизации является полная автоматизация. При полной автоматизации все функции управления, регулирования и контроля будут переданы автоматическим устройствам. Наиболее важным и принципиально новым направлением в развитии комплексной автоматизации является использование в системах управления, регулирования и контроля цифроаналоговых систем, сопряженных с электронными вычислительными машинами.
С внедрением комплексной автоматизации повышаются эксплуатационные характеристики всех систем судна и их надежность, что позволяет существенно сократить численность экипажа, тем самым снизить стоимость перевозок.
Автоматизированные системы состоят из большого числа отдельных устройств и механизмов, параметры которых необходимо измерять, контролировать и обрабатывать. Число контролируемых параметров на судне может достигать нескольких сотен и даже тысяч. При повышении у сгруппированных параметров заданных значений включается обобщенная звуковая и световая сигнализация. Посты обобщенной сигнализации могут устанавливаться в центральном посту управления (ЦПУ), в рулевой рубке, в кают компании, каютах механиков.
Благодаря росту уровня автоматизации судов, введению без вахтенного обслуживания, сокращению численности экипажа повышается роль и значение систем автоматизированного измерения и контроля параметров, сигнализации и систем внутрисудовой связи.
В связи с этим на водном транспорте особое значение приобретает повышение надежности систем измерения, контроля, сигнализации, управления, внутрисудовой связи. Это достигается увеличением надежности элементной базы, применением функционального встроенного контроля исправности отдельных блоков, резервированием и унифицированием узлов.
Измерительные элементы обычно классифицируют по роду измеряемой ими физической величины. С этой точки зрения различают элементы, предназначенные для измерения давления, уровня, температуры, расхода, скорости, перемещения, электрического напряжения, тока, частоты и т.д. Отклонение измеряемой физической величины измерительные элементы преобразуют, как правило, в механическую или электрическую величину.
В качестве измерительных элементов для измерения давлений в судовых энергетических установках применяют упругие элементы, принцип действия которых основан на деформации упругого тела при действии на него давления. Это — плоские мембраны либо сильфоны. Плоские мембраны и сильфоны применяются также для измерения перепадов давлений и следовательно, расходов жидкости или газа, поскольку расход при данной площади переходного сечения пропорционален перепаду давления на участке трубопровода.
Для измерения уровней применяются поплавковые и мембранные чувствительные элементы. Поплавки представляют собой полые металлические шары или цилиндры, связанные рычажной системой с усилительным элементом и размещенные в герметических камерах, соединяемых по принципу сообщающегося сосуда с резервуаром, в котором регулируется уровень. Недостатком поплавковых чувствительных элементов является неудовлетворительная их работа при качке судна, а также пониженная чувствительность ввиду трения в рычажных сочленениях. Эти недостатки в значительной мере устраняются в мембранных чувствительных элементах. Преимуществом последних является также возможность установки их на некотором расстоянии от резервуара, в котором регулируется уровень. Для измерения температур в системах автоматического регулирования судовых энергетических установок применяются термоманометрические, термоэлектрические и другие элементы. В системах автоматического управления частотой вращения машин в качестве измерительных элементов на морских судах используются центробежные маятники, тахогенераторы и импеллеры либо шестеренные насосы.
2. АЛГОРИТМ ПУСКА И ВЗЯТИЯ ПОД НАГРУЗКУ АДГ
Процессы управления СЭУ состоят из определенных операций по изменению режимов работы системы и механизмов. Эти операции выполняются в строгой последовательности, с учетом состояния энергетического оборудования и в соответствии с поступающими командами или показаниями измерительных приборов. Вахтенный механик при ручном управлении или автоматическая система должны обеспечить точное выполнение этих операций. Поэтому важное значение имеют правильное описание или алгоритм процессов управления.
Алгоритм функционирования автоматической системы — это точное предписание, определяющее процесс преобразования исходной информации, поступающей от датчиков или с пульта управления, в управляющее воздействий на объект управления. Процесс получения и математического описания алгоритмов управления СЕУ называется алгоритмизацией. Процессы управления описывают с помощью логических уравнений.
В соответствии с методом аналитического описания алгоритмов А.А. Ляпунова весь процесс управления представляется в виде отдельных элементарных операций, которые записывают в строку и нумеруют в порядке их выполнения слева на право.
Если направление следования процесса управления зависит от результатов действия оператора в конкретных условиях, то есть от результатов переработки информации, получаемой от датчиков, то после оператора ставится логическое условие Р і , которое может принимать два значения: 1- при его выполнении, 0 — если оно не выполняется.
В первом случае процесс переходит к следующему оператору, во втором — к тому оператору, на который указывает стрелка с его порядковым номером, расположенным после логического условия у оператора, которому передается управление, также ставится стрелка с номером того логического условия, от которого произошел переход.
Для использования математического аппарата логических схем алгоритмов (ЛСА) при описании алгоритмов функционирования СЭУ вводятся следующие обозначения входных и выходных данных, операторов и логических условий:
S H и S K — операторы начала и конца процесса управления;
A i (x 1 , x 2 … x n ) — оператор арифметических и логических вычислений;
Принципы создания АСУ ТП гражданских судов
В настоящее время основной тенденцией в мировом судостроении в части оснащения объектов системами управления является комплексная автоматизация судна как единого объекта, т.е. создание так называемых автоматизированных систем управления технологическими процессами (АСУ ТП). Внедрение подобных интегрированных систем управления и контроля позволяет резко, практически вдвое, сократить численность экипажа, обеспечить управление судном на обычных штатных ходовых режимах одним человеком из рулевой рубки. При этом повышается безопасность плавания, в т.ч. экологическая безопасность, за счет автоматизации режимов маневрирования, расхождения судов, за счет выбора оп-тимальных маршрутов и режимов движения и т.п.
Круг задач, решаемых АСУ ТП судна, чрезвычайно широк и разнообразен. Состав конкретной АСУ ТП определяется прежде всего типом и целевым назначением судна, классом его автоматизации и специальными требованиями заказчика (в т. ч. необходимость соответствия требованиям определенных классификационных обществ и международным морским конвенциям). На рис. 1 представлен перечень основных типов гражданских морских судов, на рис. 2 — состав систем, входящих в АСУ ТП судна.
Задачи решаемые АСУ ТП
1. АСУ навигации и судовождения.
1.1. Навигационное обеспечение:
— определение координат судна;
— спутниковая навигационная обстановка;
— определение и контроль курса и скорости судна;
— отображение электронной карты.
1.2.1. Оптимальное управление движением судна (авторулевой, непосредственное управление главным двигателем (ГД) и винтом регулируемого шага (ВРШ).
1.2.2. Маневрирование на безопасное расхождение и безопасный проход в узкостях.
1.2.3. Автоматизированная швартовка.
1.2.4. Оптимальное швартование судна.
1.2.5. Управление сигнально-отличительными огнями и средствами звуковой сигнализации
2. АСУ радио связи.
2.1. Обеспечение радиосвязи в диапазонах ДВ, СВ, КВ.
2.2. Обеспечение радиосвязи в УКВ диапазоне.
2.3. Обеспечение спутниковой связи.
2.4. Оперативная связь с АСУ «Морфлот».
2.5. Аварийная радиосвязь.
2.6. Обеспечение внутрисудовой связи.
3. АСУ техническими средствами (АСУ ТС).
3.1. Подсистема управления энергетическими процессами и общесудовыми системами.
3.1.1. Управление ГД и ВРШ и их диагностика.
3.1.2. Управление электроэнергетической установкой.
3.1.3. Управление вспомогательными механизмами.
3.1.4. Управление автономным оборудованием (котлоагрегатами, опреснительной установкой, компрессором и т.п.).
3.1.5. Управление общесудовыми системами.
3.2. Подсистема динамической стабилизации.
3.2.1. Стабилизация по курсу.
3.2.2. Стабилизация в точке.
3.2.3. Стабилизация по траектории.
3.3. Подсистема обеспечения безопасности судна.
3.3.1. Контроль посадки и остойчивости.
3.3.2. Контроль прочности корпуса и непотопляемости.
3.3.3. Умерение качки.
3.3.4. Пожарная сигнализация.
3.3.5. Сигнализация о наличии воды в помещениях.
3.3.6. Управление средствами борьбы за живучесть судна.
3.4. Аварийно-предупредительная сигнализация (АПС).
3.4.1. АПС в постах управления, жилых и общественных помещениях, в машинном отделении.
3.4.2. Обеспечение вызова вахтенного.
3.5. Подсистема централизованного бесперебойного электропитания. Подсистема включает в свой состав агрегат (агрегаты) бесперебойного электропитания с встроенной аккумуляторной батареей, приборы вторичного преобразования напряжения электропитания, распределения и селективной защиты цепей электропитания по потребителям (аппаратура АСУ ТП, датчики и т.п.).
4. АСУ целевого назначения.
4.1. Управление грузовыми операциями (для наливных судов, контейнеровозов).
4.1.1. Обеспечение оптимальной загрузки-выгрузки грузов исходя из состояния судна и моря, параметров остойчивости судна.
4.1.2. Оптимизация грузового плана.
4.1.3. Контроль параметров сред в емкостях судна.
4.2. Управление процессами поиска, добычи и обработки рыбы (для рыбопромысловых судов).
4.2.1. Обнаружение косяка рыбы и вывод на него судна с удержанием в заданном районе путем выдачи управляющих сигналов на авторулевой в КСУ ТС на необходимое изменение режима работы энергетической установки.
4.2.2. Выдача сигналов на изменение курса и скорости судна в процессе добычи рыбы.
4.2.3. Управление траловыми лебедками в процессе лова рыбы.
4.2.4. Автоматизация процесса рыбообработки (сортировка, разделка, замораживание, упаковка, учет готовой продукции).
5. АСУ административно-хозяйственной деятельностью.
5.1. Учет производственной деятельности.
5.2. Учет и планирование материально-технического обеспечения и продовольствия.
5.3. Бухгалтерский учет.
5.4. Информационное обеспечение капитана, контроль трудовой деятельности экипажа.
5.5. Сведения по контролю окружающей среды.
5.6. Подготовка данных для передачи по радиосвязи.
Структура АСУ ТП
Внедрение на судах АСУ ТП с указанными выше требованиями и особенностями обуславливает переход к новой структуре управления, к новым принципам формирования постов управления и контроля и их оснащенности аппаратными средствами, а также к новым принципам организации наладки и сдачи систем автоматики на судне. Организационная структура АСУ ТП судна определяется прежде всего заданным классом автоматизации судна. Техническая структура современных АСУ ТП — иерархическая (трех уровневая), с распределенной обработкой информации. На первом (верхнем) уровне обеспечивается глобальное связное управление и контроль всеми технологическими процессами. Основу данного уровня составляет станция (станции) операторская с интерфейсными каналами для организации связи с системами, входящими в АСУ ТП. Конструктивно — это пульт оператора в рулевой рубке. На данном уровне обеспечивается взаимодействие человек-система. На втором уровне обеспечивается централизованное управление и контроль автономных технологических процессов. Основу данного уровня составляют станции локальные технологические (СЛТ) — свободно программируемые микропроцессорные контроллеры. Конструктивно — это территориально рассредоточенные приборы навесного типа (полностью закрытые или с дисплейной панелью на лицевой части). На третьем (нижнем) уровне обеспечивается локальное управление и местный контроль отдельных технических средств и первичная обработка информации. Основа данного уровня – локальные системы управления и блоки сопряжения с объектами. Очевидно, что при современном уровне автоматизации судов на одного человека-оператора (как правило, капитана или его помощников) возлагаются все функции по централизованному контролю и управлению из рулевой рубки движением и маневрированием судна, управлению техническими средствами и специальным технологическим оборудованием. Поэтому исключительно высокие требования при создании АСУ ТП предъявляются к единому интегрированному пульту судоводителя в рулевой рубке, к надежности и программной совместимости комплектующего оборудования. В частности, поскольку в интегрированном пульте судоводителя размещается разнообразная по назначению аппаратура (навигационные средства, средства управления движением, средства радиосвязи и телефонии, средства управления и контроля энергетической установкой, АПС), одной из важнейших задач является компактная их компоновка с учетом требований эргономики и эстетики, удобства монтажа и эксплуатации. Наиболее оптимальным для заказчика в настоящее время является создание такого пульта поставщиком под "ключ", т.е. с установленной в нем и проверенной аппаратурой. Реализация АСУ ТП НПО "Аврора", являясь крупнейшим центром России в области корабельной и судовой автоматики, работает в области автоматизации гражданских судов более 30 лет. За это время созданы и успешно эксплуатируются системы автоматизации более 200 судов различного назначения (в т.ч. атомные ледоколы). С конца 80-х годов в НПО взамен комплекса средств автоматизации «Залив-М» были развернуты работы по созданию принципиально новых систем комплексной автоматизации, построенных на базе микропроцессорной техники. В первой интегрированной микропроцессорной системе, разработанной и поставленной «НПО «Аврора» в качестве вычислительного ядра использовались программно-аппаратурные средства фирмы ABB STREMBERG DRIVES. На основе данных средств были разработаны, изготовлены и поставлены заказчику четыре системы (АСУ ТС) для лесовозов проекта 15640 и две системы для танкера проекта 15967. В 1993 году в «НПО «Аврора» были начаты работы по созданию базового комплекта средств автоматизации «Авролог». С учетом сложности и разнообразия задач, решаемых АСУ ТП судна, жесткой конкуренцией на мировом рынке гражданского судостроения и, как следствие, необходимость соответствия требованиям целого ряда зарубежных морских классификационных обществ, в качестве основы вычислительного ядра в комплекте «Авролог» были выбраны покупные зарубежные программно-аппаратурные средства. На основе данных средств создавались и создаются приборы второго уровня АСУ ТП – приборы СЛТ, реализуется обмен информацией между приборами СЛТ, а также между всеми уровнями структуры АСУ ТП. На комплект «Авролог», включающий в свой состав базовую аппаратуру, на которой реализуются все уровни АСУ ТП, получен допуск Морского Регистра Судоходства РФ к использованию на судах. Разработаны базовые технические условия, одобренные ГУ Морского Регистра Судоходства РФ. На базе данного комплекта в период с 1994г. по 1999г. было создано и поставлено заказчику пять интегрированных систем управления для сухогруза «река-море» проекта 17310 (заказчик – АО «Завод «Красное Сормово»), система управления и контроля «Авролог ПС-500» для инозаказчика (СРВ), система управления принципиально новой сепарационной установкой. В настоящее время основу вычислительного ядра систем типа «Авролог» составляют аппаратно-программные средства производства компании «Шнейдер Электрик». Это контроллеры Modikon TSX Premium, Modikon TSX Micro и TSX Nano. Контроллер Modikon TSX Premium используется для комплексирования приборов второго уровня (СЛТ). Основные параметры контроллера:
— дискретных входов/выходов – до 1024;
— аналоговых входов – до 128;
— емкость памяти процессора до 112 К слова (с расширением – до 256);
— виды внешней сетевой связи: Fipway, UN-thelway, Asi, Modbus плюс, Ethernet; — количество абонентов (контроллеров) на сети: — сеть Fipway (частота тактов –1 МГц) – до 2-х сегментов с 32-мя абонентами в сегменте; — сеть Unifelway (быстродействие – 19,2 Кбод) – до 28 абонентов.
Контроллер Modikom TSX Micro (используется на втором и третьем уровнях структуры систем.
Основные параметры контроллера:
— дискретных входов/выходов – до 128;
— аналоговых входов – до 12;
— емкость памяти процессора – до 40 К слов;
— внешние связи : Fipway, UN-thelway, Modbus, Asi.
Контроллер TSX используется для комплексирования приборов третьего уровня. Основные параметры контроллера:
— максимальное количество входов/выходов – до 48;
— емкость памяти – до 1 К слова;
— количество абонентов на сети ( до 4-х – на сети «Nano сеть».
Модули контроллеров компании «Шнейдер Электрик» являются высоконадежными – время наработки на отказ составляет от 150 до 350 тыс. часов (в зависимости от типа модуля). Партнерское сотрудничество с компанией «Шнейдер Электрик» позволяет реализовать АСУ ТП конкретного судна (прежде всего в части КСУ ТС и АСУ целевого назначения) на уровне, соответствующем современным мировым требованиям. Следует отметить, что заказчику (строителю судна) в настоящее время выгодно заказывать как можно больше аппаратуры у одного поставщика. Это позволяет минимизировать суммарный объем аппаратуры, обеспечить комплексную отладку систем и соответственно затраты на автоматизацию. Именно такой объем услуг предлагают в настоящее время заказчикам такие ведущие зарубежные фирмы как ABB, Side Marine, Imtech Marine and Industry, KonGsberg MariTime и др. В связи с этим «НПО «Аврора» для перспективных проектов предлагает заказчику АСУ ТП практически в полном объеме (АСУ судовождения и навигации, АСУ радиосвязи, АСУ техническими средствами с включением в объем поставки комплекта электрораспределительных устройств, целый ряд подсистем АСУ целевого назначения, АСУ административно-хозяйственной деятельностью). В комплект поставки включаются интегрированные пульты в рулевой рубке и ЦПУ. Таким образом, «НПО «Аврора» готово выполнять функции генерального поставщика систем автоматизации судна и обеспечивать их комплексную увязку как составных частей АСУ ТП. Именно такой подход реализовывается в настоящее время для судов химовозов проекта 95132, запланированных к постройке в АО "Балтийский завод". Структура АСУ ТС данного судна представлена на рис. 3.
Классификация систем управления
Судовые энергетические установки (СЭУ) представляют собой совокупность отдельных механизмов, систем и устройств, связанных между собой и управляемых человеком в процессе эксплуатации. Функции управления СЭУ включают в себя:
- запуск и остановку;
- изменение режимов работы;
- поддержание с заданной точностью параметров установленного режима работы;
- распознавание и предотвращение аварийных состояний.
Для выполнения функций управления необходимо контролировать отклонения процессов преобразования энергии от требуемых условий и параметры самих процессов, непрерывно обрабатывая поступающую информацию. Результатом анализа отклонений являются регулирующие воздействия на процессы преобразования энергии, ее интенсивности или перераспределения. Перечисленные операции, выполняются в строго заданной последовательности определенным набором технических средств. Совокупность предписаний, определяющих последовательность, содержание и условия выполнения операций, для обеспечения требуемого энергетического процесса, называют алгоритмом управления , а устройство взаимосвязанных технических средств для реализации алгоритма управления без участия человека — автоматической системой. Различают два вида автоматических систем: система автоматического управления (САУ) и система автоматического регулирования (САР).
Система автоматического управления обеспечивает без участия человека автоматический запуск объекта, целенаправленное протекание теплоэнергетического или технологического процесса и его прекращение при определенных условиях.
Если система управления предусматривает участие человека на каком-либо этапе функционирования объекта управления, то ее называют автоматизированной системой управления (АСУ).
Система автоматического регулирования предназначена для поддержания в объекте управления некоторых величин либо постоянными, либо изменяющимися по определенным зависимостям, при изменяющихся внешних условиях.
САР предназначенные для поддержания только одной величины в заданных пределах, получили название автоматических регуляторов.
В любом случае автоматизированная СЭУ состоит из объекта управления (ОУ) и системы управления средствами автоматизации, их нельзя рассматривать отдельно друг от друга.
Объект управления — это отдельные главные и вспомогательные механизмы, устройства и системы или их совокупность, в которых протекает энергетический процесс.
В зависимости от характера выполняемых функций различают следующие виды средств автоматизации:
- системы дистанционного автоматизированного или программного управления;
- системы автоматической защиты и блокировки;
- системы автоматического контроля и сигнализации.
Системы дистанционного управления (СДУ) позволяют оператору на расстоянии включать и выключать отдельные механизмы, системы, части установки или установку в целом, менять режимы работы.
Системой дистанционно-автоматизированного управления (ДАУ) называют систему, в которой человек-оператор лишь задает нужный режим с пульта управления, а все промежуточные операции управления осуществляются автоматически по заданному алгоритму.
Системы автоматической защиты и блокировки обеспечивают:
- автоматическое предотвращение аварийных ситуаций путем остановки механизмов при достижении контролируемыми величинами установленных предельных значений;
- блокировку возможной неверной последовательности переключений, способных привести к аварии, например, нельзя среверсировать дизель без соответствующей команды машинного телеграфа;
- включение резервных технические средства, например, при падении давления охлаждающей воды работающего главного дизеля включаются резервные электронасосы.
Применение таких систем повышает надежность установки и упрощает ее обслуживание.
Системы автоматического контроля и сигнализации поддерживают информационное обеспечение, путем измерения текущих значений контролируемых величин (давления, температуры, уровни и т. п.), объективно характеризующих ход процесса, сравнение их с допустимыми значениями и выработке на их основе необходимых управляющих воздействий на объект. Для наблюдения за абсолютным значением контролируемых величин в состав систем автоматизированного контроля входят различные показывающие приборы, обегающие устройства, последовательно подключающие эти приборы к разным датчикам, устройства регистрации текущих значений контролируемых величин. Система автоматической сигнализации является частью системы автоматизированного контроля.
В зависимости от алгоритма управления АСУ подразделяют на:
- стабилизирующие;
- программные;
- следящие;
Алгоритм работы стабилизирующей автоматической системы предписывает поддерживать контролируемую величину постоянной или не выходящей за определенный диапазон, независимо от времени: К стабилизирующим системам относят автоматические системы поддержания уровня и давления пара в барабане котла, давлений в различных судовых системах.
Алгоритм работы программной автоматической системы предполагает изменение управляемой величины по заранее заданному во времени закону или в зависимости от изменения другой величины. Примером служит программа ввода-вывода главного двигателя в маневровый режим, или система регулирования давления воздуха, подаваемого в топку котла. При этом управляемая величина -давление воздуха — изменяется в первом случае по времени, во-втором- в зависимости от количества топлива, подаваемого к форсункам.
С помощью следящей автоматической системы управляемую величину изменяют в зависимости от поступающего на вход системы задающего воздействия, произвольно меняющегося во времени. Название системы подразумевает, что управляемая величина должна непрерывно следить за задающим воздействием. Следящие автоматические системы широко используют в системах ДАУ главных двигателей и в системах ДУ различной арматурой.
Комплексные системы управления (КСУ) являются высшей ступенью в иерархии АСУ, связывают в единое целое системы автоматизированного контроля и управления, освобождают человека от многих рутинных операций воздействия на СЭУ и позволяют отказаться от постоянной вахты в машинном отделении. Для выполнения этих операций в КСУ задействованы управляющие компьютеры.
Задача управления в ее простейшей форме заключается в обеспечении заданного режима работы ОУ путем поддержания постоянной или изменяющейся по определенному закону некоторой физической величины, называемой регулируемым параметром. Для контроля значения регулируемого параметра устанавливают контрольно-измерительные приборы.
На ОУ влияет ряд факторов: изменение нагрузки, возникновение дисбаланса между подводом и отводом вещества или энергии, воздействие внешних условий, изменение которых вызывает отклонение режима работы ОУ от нормального, т. е. оказывает на него возмущающее воздействие , и в конечном итоге приводит к отклонению регулируемого параметра. Процесс управления заключается в компенсации влияния возмущающих воздействий на значение регулируемого параметра введением управляющего воздействия, восстанавливающего заданный режим.
Функциональные схемы различных автоматических систем дают возможность уяснить, какие функции выполняют основные элементы системы. Стрелками на схемах показывают воздействие одного элемента на другой. По принципиальным схемам можно понять принцип действия той или иной системы.
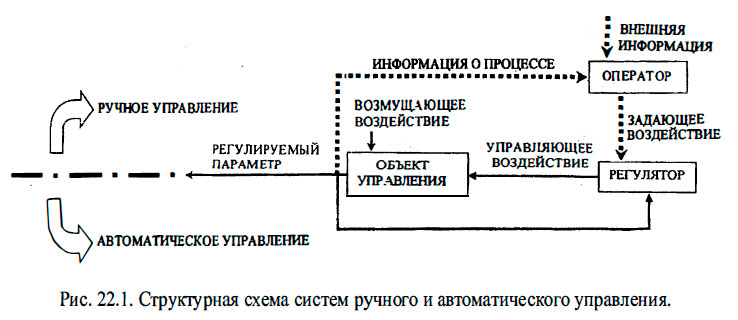
В приведенной на рис. 22.1. замкнутой схеме автоматического управления роль оператора по поддержанию заданного режима выполняет автоматический регулятор. Он воспринимает сигналы об отклонении регулируемого параметра и преобразует его в управляющее воздействие на ОУ. Для перестройки регулятора на поддержание различных режимов (значений регулируемого параметра) служит задающее воздействие, формируемое оператором, в соответствии с внешней информацией и информацией о процессе. При несовпадении значения регулируемого параметра с заданным (их разность называют рассогласованием) автоматический регулятор оказывает управляющее воздействие на ОУ до тех пор, пока последний не будет выведен на заданный режим. Таким образом, в замкнутых САР на вход регулятора поступают две величины: задающее воздействие и выходная величина объекта — регулируемый параметр (регулируемая величина). Регулятором же осуществляется обратная связь (ОС) — соединение выхода объекта с его входом. При этом воздействие по замкнутой цепи передается только в одном определенном направлении. Замкнутые САР называются также системами с обратной связью или системами регулирования по отклонению. Имеются также системы регулирования по нагрузке (разомкнутые системы), в которых регулятор реагирует только на один вид возмущения — изменение нагрузки. Такие САР называют системами регулирования по возмущению. В разомкнутых системах отсутствует обратное воздействие регулируемого параметра на регулирующее или задающее воздействие, т.е. система не имеет обратной связи. В комбинированных САР, имеющих два чувствительных элемента, в одну систему объединяются САР по отклонению и САР по возмущению.
Автоматизированные системы управления судовых энергетических установок
Епихин Алексей Иванович
нач. кафедры, к.т.н., доцент
Кафедра «Эксплуатация судовых механических установок» (ЭСМУ) со времени своего образования в 1999 году, является одной из ведущих кафедр судомеханического факультета ГМУ им. адм. Ф.Ф.Ушакова, который занимается подготовкой высококвалифицированных специалистов для морского флота и транспортной отрасли. В сентябре 2019 года кафедра была реорганизована путем объединения с кафедрой «Ремонт судовых машин и механизмов», которая была организована в 1979 году и кафедрой «Судовые тепловые двигатели» образованной в 1975 году, с момента образования Новороссийского высшего инженерного училища – НВИМУ. Кафедра ЭСМУ является выпускающей кафедрой по специальности 26.05.06 «Эксплуатация судовых энергетических установок», основными направлениями работы кафедры являются:
— подготовка и выпуск специалистов, с присвоением квалификации «Инженер-судомеханик» по специальности 26.05.06 «Эксплуатация судовых энергетических установок»;
— подготовка научных кадров и подбор профессорско-преподавательского состава; — разработка учебно-методической литературы, включая учебные пособия, лабораторные практикумы;
— подготовка и публикация научных статей, докладов на Международных, отраслевых и внутривузовских научно-технических конференциях, монографий;
— подготовка и защита кандидатских и докторских диссертаций аспирантами и соискателями;
— создание и модернизация лабораторной и материально-технической базы;
Основные задачи кафедры
Организация и осуществление учебного процесса по дисциплинам специальности 26.05.06 «Эксплуатация судовых энергетических установок» и дисциплинам других специальностей.
Подготовка высококвалифицированных специалистов для различных отраслей водного транспорта.
Проведение научно-исследовательских работ для судоходных и судоремонтных компаний.
Повышение квалификации профессорско-преподавательского состава.
Руководство практиками курсантов и студентов заочного факультета (плавательными – учебной и производственной, а также судоремонтной).
Оснащение лабораторий современным тренажерным оборудованием, приборами и наглядными пособиями.
Основные направления научной и учебной работы кафедры
- Совершенствование технической эксплуатации судовых энергетических установок.
- Исследование эффективности использования топливно-энергетических ресурсов судна и судовых технических средств.
- Создание банка данных по теплопроводности растворов.
- Подготовка и защита кандидатских и докторских диссертаций по тематике научных исследований.
- Разработка учебно-методической литературы и матералов (учебно-методические комплексы и рабочие программы дисциплин, фонды оценочных средств, учебники, учебные пособия, лабораторные практикумы).
- Повышение безопасности мореплавания за счёт оптимизации работы энергетической установки судна на основе исследования рабочих процессов.
- Совершенствование технической эксплуатации и оптимизация эксплуатационных параметров судовых технических средств.
- Решение задач технической эксплуатации судовых энергетических установок (СЭУ) на базе современных информационных технологий.
- Обеспечение эксплуатационной надежности судна и судовых технических средств.
Перечень читаемых дисциплин
Кафедра «ЭСМУ» осуществляет проведение всех видов занятий по следующим дисциплинам выпускной специальности 26.05.06 «Эксплуатация судовых энергетических установок», а также по дисциплинам других специальностей и направлений подготовки (ЭСЭСА, НТТС, ЭТТМ и К, СВ, ТТП, УВТ и ГОС, ТЭТР) по очной и заочной форме обучения:

